Discorpy’s documentation
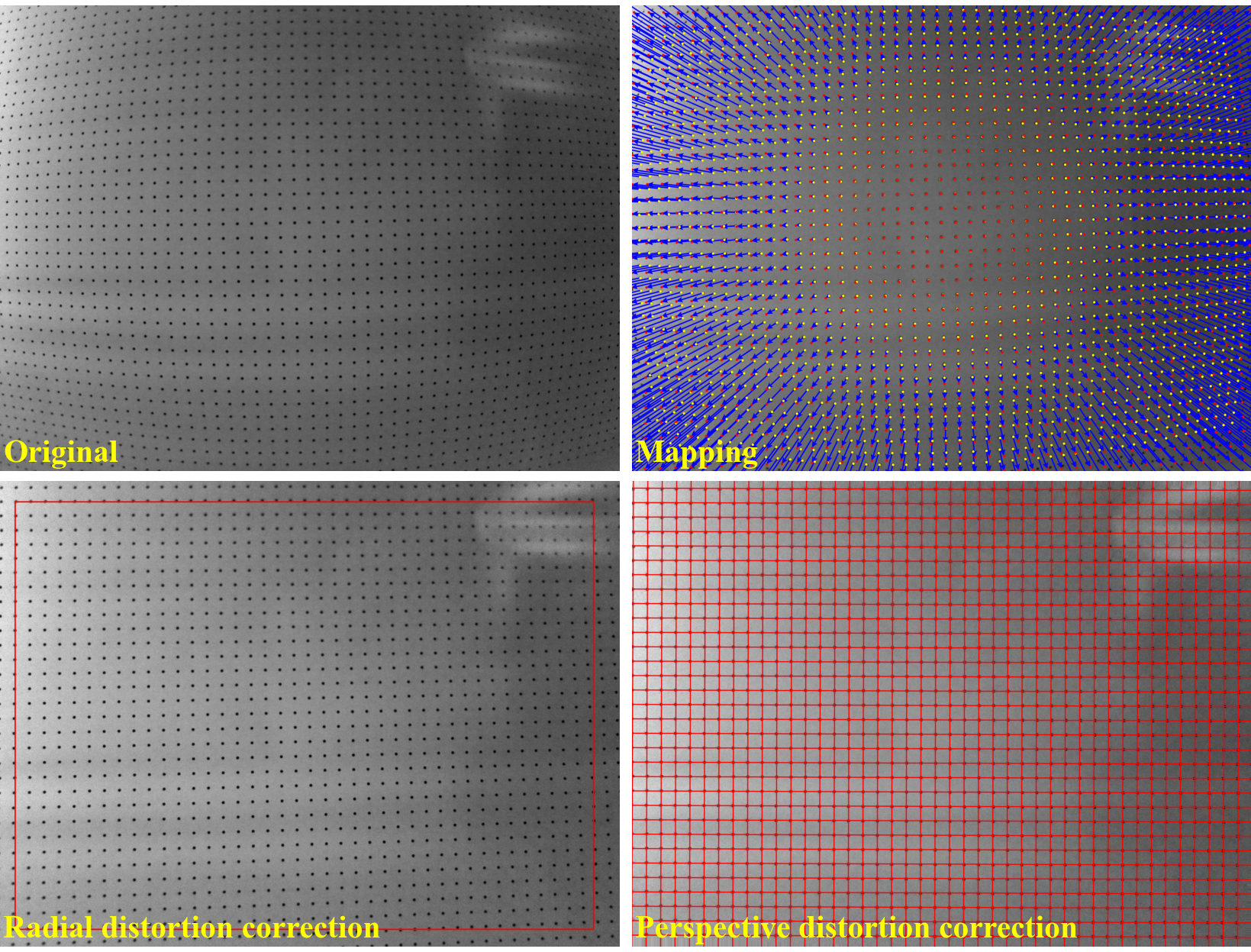
Discorpy is an open-source Python package implementing methods for calibrating and correcting distortion in lens-based imaging systems [C1] [C2]. Unlike existing approaches that require multiple calibration images or iterative optimization, Discorpy and its algorithms can independently characterize both radial and perspective distortion with high accuracy across a wide range of distortion strengths - using only a single calibration image and direct computation. This makes the software a practical tool for a wide range of imaging applications.
To support different experimental conditions and enable fully automated workflows, Discorpy offers flexibility in calibration patterns, including dot-pattern, line-pattern, and chessboard images. It also provides robust preprocessing methods for extracting reference points, handling image artifacts, and grouping points into lines. Discorpy has been successfully applied to calibrate detectors in X-ray tomography systems, where sub-pixel accuracy is critical, as well as to correct fisheye distortion in large-field-of-view cameras.
Showcases: https://discorpy.readthedocs.io/en/latest/usage.html#demonstrations
Source code: https://github.com/DiamondLightSource/discorpy
Examples: https://github.com/DiamondLightSource/discorpy/tree/master/examples
Author: Nghia T. Vo - NSLS-II, Brookhaven National Laboratory, US; Diamond Light Source, UK.
Keywords: Camera calibration, radial lens distortion, perspective distortion, distortion correction, fisheye distortion, distortion center determination, tomography.
Contents
- 1. Installation
- 2. Tutorials
- 2.1. Causes of distortion
- 2.2. Methods for correcting distortions
- 2.2.1. Introduction
- 2.2.2. Extracting reference-points from a calibration image
- 2.2.3. Grouping reference-points into horizontal lines and vertical lines
- 2.2.4. Calculating the optical center of radial distortion
- 2.2.5. Correcting perspective effect
- 2.2.6. Calculating coefficients of a correction model for perspective distortion
- 2.2.7. Calculating coefficients of a polynomial model for radial-distortion correction
- 2.2.8. Correcting a distorted image
- 2.2.9. Summary
- 3. Usage
- 3.1. Resources
- 3.2. Notes related to Python programming
- 3.3. Demonstrations
- 3.3.1. Process a high-quality calibration image
- 3.3.2. Process an X-ray target image having perspective effect
- 3.3.3. Process a challenging X-ray target image
- 3.3.4. Process a line-pattern image
- 3.3.5. Correct both radial distortion and perspective distortion
- 3.3.6. Calibrate a camera using a chessboard image
- 3.3.7. Correct perspective distortion
- 3.3.8. Correct radial distortion of an image without using a calibration target
- 3.3.9. Useful tips
- 4. Technical notes
- 5. API reference
- 6. Update notes
- 7. Credit